Flood plain contract results in new software
By Robert A. Fowler
Lasermap Image Plus is a small company which has been in the LiDAR business for a long time. Over the years it has completed a number of large flood plain mapping projects. But in 2001 it won two major projects both of which required a lot of data processing. The first was a study of areas prone to flooding along 167 rivers in the province of Quebec, Canada and is actually one of the largest flood plain contracts ever awarded. Quebec is Canada’s largest province, being approximately 2.2 times the size of Texas
A few years ago, scenes of the Saguenay floods were broadcast around the world, especially the picture of a house sitting apparently in the middle of a raging torrent of floodwater spilling around it. This particular flood situation like flooding in mainy areas was the result of unusual weather events. In this case it was ice blocking an unusually fast spring melt of snow. Rivers got dammed and water built up behind the dams of ice which finally let go with disastrous results. Floods happened along many of the province’s rivers, but it was the dramatic image of the house on the Saguenay which caught the attention of the world’s media.
Following these floods the Quebec government put in place a study to determine where the most likely flood areas would be so that the effects of rising water in these areas could be mitigated, or at very least used for early warning for the population.
“They pre-selected areas along the 167 rivers where there is likely to be a significant effect on human population,” said Guy Beliveau, who consulted with government departments about Lasermap’s unique ability to provide a timely and accurate survey.”
“The problem is” he added, “flood areas, rather obviously, tend to be flat –which is why they flood, but they are not necessarily absolutely flat. There are undulations which create unique situations and conditions. This has a tremendous effect on the hydrological modeling of what really happens. And this was of great interest to a wide body of scientists in the province.”
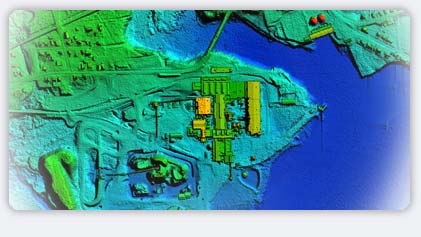
“The reason why LiDAR is such an ideal way of studying flood plains is because the amount of data surveyed is gathered universally over the area flown, say, in comparison to field surveying which captures transects at specific intervals, or photogrammetric methods which tend to follow the contour intervals and not provide data in between. The reality is, numerous small undulations occur which get missed by most other methods.”
“LiDAR, by the essence of its nature builds a comprehensive and complete digital terrain model on the basis of real pointings at fairly regular intervals.”
“There were several rather unique aspects to this project,” said Pierre Belanger, Lasermap’s general manager. “The biggest one for us initially was the logistics. The 167 rivers were spread over the whole province, and we literally surveyed from one end of the province to the other. So the first thing we had to do was put in place a massive logistics plan.”
The province was broken into seven areas from Gaspe in the east to the Outaouais in the west and Abitibiti in the north to the USA border in the south. Then each area was reviewed for the optimum data acquisition point of view. This was to reduce ferry times for the aircraft as well as having a logical plan for the field crews to provide base station GPS surveys and quality control.
The Quebec government requested, that as much as possible the airborne LiDAR survey be conducted during snow-free, leaf-off conditions, to provide the best penetration of the LiDAR signal to the ground. Acquisition seasons were determined as Spring and Fall 2001 and Spring of 2002, thus collapsing significantly the real time to do the acquisition. “Typically,” said Pierre Belanger that can be as short as three weeks in the Spring and sometimes even less in the Fall. However, last year we were extremely lucky that our Fall was relatively mild. We were able to survey from the time the leaves came down until the middle of December. Some years, we have snow in mid October!”
Some of the flood plain areas were relatively small, being only a few kilometers long, but others were fairly extensive. Sometimes several ground crews had to be mobilized so that ground stations were operating at different locations, so that the aircraft was not held up waiting for a crew to move to the next site.
Lasermap had a distinct advantage in this respect, as the company is owned by GPR Consultants which, apart from having a small GIS and mapping wing, primarily work in construction and legal surveys in Quebec. The 60 strong work force of surveyors and crews were able to support the airborne acquisition easily.
Huge quantities of data have been gathered in the study of flood plains. And that was where Lasermap was faced with the second major problem: the massive task of processing huge quantities of data and representing the hydrologic model with real accuracy.
One of the major problems for all LiDAR operators is the processing of the LiDAR data to remove the effects of vegetation. This is relatively straightforward for big variations in data pointing. Tops of trees show remarkably well in the point cloud and can be literally seen. Most of the intermediary story of vegetation, bush or scrub can also be identified fairly easily with the standard algorithms for processing LiDAR data.
However, in many flood plains there is a lot of undulation of ground which falls in the one to two feet category and these become mixed with returns from low level but sometime quite dense ground cover vegetation. The LiDAR processing technician, therefore enters the realm of what can best be described as noise in the data set. This produces a quandary for the processing technicians. Ground that is covered with long grass, bullrushes or noise level vegetation creates a series of problems. If you set the parameters in the processing to remove the grass and bull rushes, you then remove a lot of the small undulations.
The company was facing a situation that meant tremendous intervention by processing technicians in the processing phase of the work. Essentially it appeared that it would be necessary to review and interpret imagery combined with the elevation data sets. This would normally add thousands of hours to the processing tasks. The alternative was to set the parameters to remove the grass and provide the clients with an incorrect surface model.
One of the company’s scientists reviewed the problem and decided there might be a way to resolve the majority of the problems. He observed that there were some striking similarities with certain features in flood areas which appeared common to most areas. With this in mind he modeled these features mathematically. The number of features which most often occurred numbered about 100, and they fit specified mathematical patterns –although the sizes of the features could vary. These patterns were consistent with the feature, compared to random patterns afforded by low vegetation. These 100 model features were incorporated into the processing algorithms and when the LiDAR data were passed through the new software it became very evident that this approach worked remarkably well. The software recognized where the noise was grass, low scrub and bull rushes and where the data were essentially a low-level feature that was above the surrounding flood plain.
In effect this is easiest thought of as a variation of an automated feature extraction program, but not quite, as the features that are being recognized are not necessarily buildings or man made constructions. So it is not feature recognition in the normal accepted sense. It is more of a landscape recognition factor.
The methodology, however, is perhaps most easily explained in the example of a roadway. Most roadways are built with a slight camber which drains rainwater off to the side. As a result the water at the side needs to be drained, and thus roadways typically have small depressions either side of them which are either man made or natural. These ditches are an integral part of the natural aspect of a cross section through a road, and as such can be modeled. Thus a pattern of LiDAR points which cross a road should pick up the camber and drainage. Typically though, most software packages tends to average the DTM data so that the ditches tend to be filtered out (unless they are large or very deep) or simply missed.
With the software developed by the scientists at Lasermap, however, the processing algorithms recognize the road as a landscape feature and the software then expects that the shape should be retained, rather than averaged and looks for a point somewhere along the feature which verifies this.
As you can imagine this is not a simple set of rules, as a road feature is only one item of many that affects a landscape, and also affects the hydrological flows of surface water. As, mentioned, to date, Lasermap has proprietary software which is capable of recognizing up to a hundred different landscape changes.
Does this solve the problems of automated feature recognition. No, not by a long way, but the company has demonstrated that it reduces the amount of intervention by operators during the processing. Most LiDAR companies will tell you the automated processing is right 90% of the time. The old financial cliché comes into this too. It costs 20% of the processing money to do 80-90% of the processing work. Unfortunately the remaining10-20% of the work requires adjustments by the processing technician or is simply missed. This final processing step is 80% of the processing cost.
While a considerable amount of effort was expended on the software development, Lasermap has increased its automated processing to 99% reliability, reducing operator intervention time by 80-90% and increasing the real accuracy of the final product.
First published in EOM (Earth Observation Magazine) April 2002