LiDAR for flood mapping
By Robert A. Fowler
Abstract: This paper presents practical instances where LiDAR was used to create base maps for analyzing flood risks. The paper focuses on the mapping requirements, the technology and collection methods, data validation and applications. Some flood models are shown in graphic form to emphasize the effects on a particular region.
Floods are one of the major natural disasters you watch on CNN, hopefully happening somewhere other than where you live. They seem to be occurring more often, or at least being reported more often. Recent large floods such as those on the Mississippi and in 1997 on the Red River cause real hardship to the people who live in the affected area, as well as destroying much property, livestock and wildlife.
Lasermap was contracted in 1999 to provide flood risk mapping data for 200 square miles in Manitoba, south of Winnipeg in the flood prone area of the Red River. It wasn't the first time Lasermap has completed flood risk mapping. The company also did laser surveys in Québec in the Haha River valley.
Much of the Red River valley in reality is subject to repeated flood threats, and major events have occurred throughout recorded history. During 1997, a combination of natural events (heavy winter snowfall culminating with a major blizzard in April 1997) followed by a quick melt, resulted in huge areas being flooded in the USA and Canada. During these floods, livestock were lost, numerous farms inundated and millions of dollars of personal property was destroyed or damaged. Most people in North America did not realize the extent of this flood. For example, the primary north-south route, Interstate 29, was closed. There were no bridges open across the Red River from Fargo to Winnipeg – a distance of over 200 miles. Rail traffic was stopped and had to be re-routed.
Some stored Toxaphene (a chemical pesticide, which had been banned in Canada and the USA in 1982) escaped from a flooded warehouse in Grand Forks, where it had been stored, with trace contamination appearing over a huge area, reaching as far as Lake Winnipeg. While this was declared a low risk hazard to health, it indicates some of the unpredictable side effects which can happen when floods occur.
Despite being the most recent flood on the Red River of the North, the International Joint Commission (which is the USA/Canada transborder committee that looks after water bodies which traverse the border) has indicated there is plenty of historical evidence that major floods of this size are not unusual. Indeed, there is a history and potential for even larger floods.
While people who live in flood prone areas may be tempting fate, some basic data are required to determine the various levels of flood risk, and to avert construction or habitation in areas where flooding is likely to be a relatively common occurrence. While this sounds very logical, there are huge areas in the Red River plain where the extent of risk is not easily ascertained. Small differences in elevation may extend several miles. The source of the risk can thus appear to be remote for people constructing dwellings or businesses in areas which are located well away from the river.
So the degree of accuracy of elevations in a digital terrain format for flood risk surveys and mapping is important and can have significant ramifications if not met. Usually spot elevations are required to six inches in accuracy, with contours plotted at one-foot intervals.
In the past, detailed high accuracy mapping, has been an expensive proposition. But now airborne LiDAR technology is allowing large areas of precise data to be captured relatively economically.
LiDAR is an acronym for Light Detection and Ranging. LiDAR systems have been around for a long time, but it has only been recently that they can be used from moving airborne platforms with a high degree of accuracy. This is due to the development of precise inertial measurement units and airborne GPS.
Laser systems themselves are typically very accurate in their ranging capabilities, providing distances accurate to a couple of centimeters over a fairly wide range of distances. The accuracy limitations of the packages are due primarily to the GPS and IMU (Inertial Measurement Unit).
These days, with proper airborne GPS installation and carefully monitored GPS ground stations, for solving translocation solutions, the GPS results can be accurate to 5-7 centimeters. The IMU's vary depending on manufacturer but can typically have an error of about 0.01 of a degree. Point one of degree is 0.6 minutes. At 3000 feet above ground this translates to 5-7 centimeters. The higher you fly, however, the larger the circle of error becomes.
When you add all of these possible errors together at a flying height of 3000 feet, the circle of possible error is around six inches to one foot in horizontal accuracy and six inches in vertical accuracy. And no amount of fiddling with the data will much improve these figures!
LiDAR systems are typically used at fairly low flying heights for detailed, accurate surveys. When you fly these systems higher, a couple of things happen. The beam of the LiDAR tends to distend further – that is the footprint on the ground gets bigger. And while the accuracy of the IMU stays the same, because the accuracy is related to any angular errors, the higher you fly the greater the effect of the angular error. So, for example, at a 6000 feet flying height, the possible IMU error is double that of the error at 3,000 feet. However, this error is only in the horizontal coordinates. The elevation error computed from the laser range is not affected as much.
However, there is another consideration. The higher the LiDAR flies, because of a larger footprint, there is more likelihood of some averaging of the return signal from undulations on the ground. Also with a larger footprint, it is typically harder to penetrate vegetation with accuracy because, depending on the system, the receptor averages some of the reflected signals it receives.
On the other hand, many new systems can record multiple returns from the same pulse. In other words if the beam hits some leaves at the top of the tree canopy, but part of the beam travels further and hits a couple of branches, and then another part of the beam hits the ground, if the beam has enough strength to reflect back, the receiver will record the reflections from each return. The interpreter then has to decide which is which.
Because most LiDAR systems currently send out pulses between 5000 and 25,000 times a second, the ground distance between reflected pulses is quite small. Usually in the 2.5 – 5 feet range. So even though some shots may not hit the ground (because of too much vegetation) enough of the shots will penetrate to the ground to provide a reliable digital terrain model. However, in heavily forested areas, it has to be remembered that while there may be a pulse hitting something every 2.5 feet, there will not necessarily be ground elevations at that spacing. In heavily treed areas a lot of the shots will return from the top of the tree canopy.
While there appears to be a lot of things to take into consideration when determining the technical requirements of a LiDAR survey, there are really only two things a client needs to specify: firstly, the accuracy desired in terms of elevation and position of spot elevations, and secondly the point spacing required. Whether, for instance, you require a point every five feet accurate to 6 inches or every 30 feet accurate to 2 feet or any other combination, those become the technical requirements - remembering of course that not every shot will hit the ground. It is only fair to state that these specifications are valid in areas clear of vegetation.
LiDAR data are acquired usually within an angular scan of a number of degrees. Towards the apogee of the scan the errors do tend to increase – simply a function of geometry. Though within a framework of twenty degrees either side, there is a reasonable chance of the beam penetrating to the ground. Directly beneath the aircraft, any hole in a canopy will definitely be penetrated. LiDAR technology is the only survey method that will do this.
For while aerial photography can also see through the canopy directly below the camera, to measure the ground elevation, the photogrammetrist has to use two photographs from different positions. In vegetated areas, one photo may see the ground, but the next photo will likely not.
A different problem occurs with radar survey systems. These are practically all side-looking systems, which means they shoot the radar beam at an angle off to the side, rather than vertically straight down. They are best used in flood plain mapping where there is little vegetation. The reason is they have problems penetrating densely vegetated areas, and do not survey at all the "shadow" areas behind objects. There are also problems with layover, a phenomenon caused by the wavelength of the radar and its interpretation.
LiDAR are therefore, particularly well suited to flood mapping. The large number of accurately generated points provides a wealth of data for flood plain modeling. And, as mentioned previously, accuracy is paramount. In many flat areas, the difference of floodwaters rising by an additional foot can inundate thousands of acres. Such knowledge can mean the difference between flood remediation efforts being effective or not.
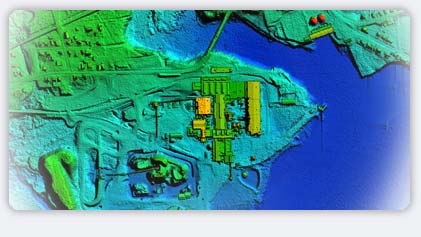
Figure one shows a small portion of the Haha River in Quebec, surveyed by LiDAR and rendered as a three dimensional image of the site. The relief is color coded with the darkest blue being the river and then upwards through the shades of green, yellow to red, with red being the highest. There is vertical exaggeration in the rendition to accentuate the different levels of elevation. The contours generated from the DTM are below. This project covered an area 13 kilometers along the river by 2 kms wide.
This survey was essentially a pilot project for the Environment Department of the Government of Quebec and was conducted in early spring when traces of snow still were on the ground. Despite that, Lasermap was able to achieve accuracies within the 15 cm (6 inch) range, much to the surprise and delight of the client.
A much more extensive project was conducted in 1999 for the IJC. The USA/Canada International Joint Commission is responsible for water bodies and river basins which cross the border between the two countries. The Red River valley and its tributaries' watersheds wander back and forth across the various borders between North Dakota, Minnesota and Manitoba. The Pembina River, which flows into the Red River, crosses the border a couple of times. This whole area was victim to massive flooding during 1997.
The number of people affected by flooding in these low-lying areas is huge. For example, one estimate has close to 70 percent of the total population of Manitoba living in a flood risk zone!
Because the area is so flat, determining the areas likely to flood at any given level is extremely difficult. Existing digital terrain models were generally only accurate to a plus or minus 3-10 feet at best and in some areas plus or minus 30 feet.
Lasermap was contracted to fly 200 square miles south of Winnipeg. The flying height was 2,000 feet above ground and line spacing was such that each line overlapped the next by 50%, in effect providing 100% overlap. This increased the number of data points significantly.
The data were collected using Lasermap's upgraded Optech 1020, a system ideally suited to the low level flying required to meet the stringent specifications. Data points were basically acquired at approximately 2 feet intervals, which resulted in huge datafiles. These were thinned to produce the required deliverables (otherwise they would have been too large for the client to handle).
The ground crews monitored the GPS ground stations and also surveyed some GPS profiles as a quality control measure. This is an important aspect of LiDAR surveys. To ensure the accuracy requirements for flood mapping are met, you need a contractor who will prove he has done quality control to monitor the various systems. The GPS data should have consistency using a minimum of six satellites. Inertial data should resemble the flight trajectories. The laser should be returning consistent returns in the 95-98% range unless over water. You need ground stations to compute proper translocations for the airborne data, and to ensure you are on the same coordinate reference frame as the client. Many of these quality control checks need to be done in the field on a daily basis, so that if satellite lock is lost or some other malfunction occurs, the contractor has the opportunity to re-fly the affected portion of the mission before demobilizing.
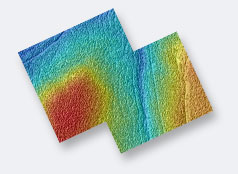
Figures 2-6 show an example of how the differences in water levels can affect areas flooded. These models were created with one meter increments in water levels. The background image is a shaded relief produced from the LiDAR data with the main watercourse being the Red River south of Winnipeg. The illustrations cover an area almost 4.5 miles wide in an east-west direction.
Interestingly for us, one of the quirks that occurred on this project, luckily discovered after only a couple of tiles were processed, was the Optech software (which automatically removes vegetation) assumed that the berms surrounding many outlying farmhouses and buildings, were dense hedges, and thus removed them. Once the technicians noted what was happening, they monitored the process carefully using the video tracking record to quality control the software results. The berms, of course, were put back in, as indication of existing remediation infrastructure.
The result was a textbook LiDAR project, about which the client's independent consultant said the following:
"The Manitoba Geomatics people have completed a number of fairly rigorous comparisons of the LiDAR data to other data sets in their possession and found the LiDAR data is well within specified accuracy. In one case the average difference between the LiDAR and other kinematic GPS surveys was 6 cm. I think everyone agrees…that we have a textbook product."
These projects proved conclusively that LiDAR, properly used and flown, is an ideal tool for flood risk mapping. Not only that, it is the least expensive method of covering a large area with detailed data.
First published in EOM July 2000.
This is the second article in an irregular EOM series about LiDAR written by Robert Fowler, Vice President of Sales and Marketing for Lasermap Image Plus. He can be reached at bobf@lasermap.com.